   |
|
Синхронное усреднение и балансировка машин
Дэвид Кадушин, СКФ Кондишн Мониторинг Инк.
Точность балансировки зависит от точности и стабильности измерений амплитуды и фазы сигнала вибрации. Соответствующие программы позволяют рассчитать по результатам измерений массу и положение требуемых корректировочных грузов. Процедура синхронного усреднения обеспечивает точное измерение фазы в процессе пробных балансировочных пусков, минимизируя влияние шума и составляющих на частотах, близких к оборотной. В настоящей статье обсуждается метод балансировки на основе синхронного усреднения сигнала во времени применительно к вентиляторам башенного охладителя, установленным друг рядом с другом в защищенном от влияния погодных условий помещении.
Синхронное усреднение представляет собой выделение посредством усреднения по времени только тех составляющих сигнала, которые согласованы с вращением ротора машины. Шумовые и несинхронные составляющие сигнала в процессе синхронного усреднения стремятся к нулю.
На рисунке 1 показана упрощенная блок-схема типичного БПФ-анализатора. Обычно при реализации процедуры синхронного усреднения в качестве датчика вибрации берут акселерометр с интегрирующим усилителем. Этот усилитель имеет низкий выходной импеданс, что делает его коэффициент преобразования независимым от длины соединительного кабеля.
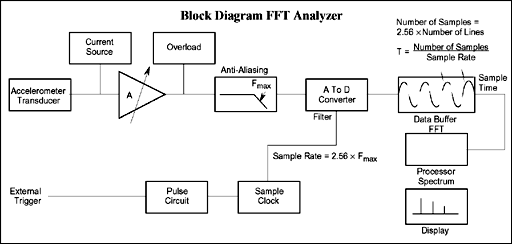
| Accelerometer Transducer | - акселерометр, | Current Source | - источник питания, |
| A | - усилитель, | Anti-Aliasing | - аналоговый фильтр для защиты от наложения спектров, |
| A to D Converter | - АЦП, | Sample Time | - общая длительность выборки, |
| External Trigger | - внешний запуск сигнала синхронизации, | Pulse Circuit | - устройство формирования импульса синхронизации, |
| Sample Clock | - устройство формирования импульсов отсчетов данных, | Sample Rate | - частота выборки (дискретизации), |
| Data Buffer | - буфер данных, | FFT Processor | - процессор БПФ, |
| Spectrum Display | - устройство отображения спектра, | Number of Samples | - число значений в выборке, |
| Number of Lines | - число линий в спектре |
В состав БПФ-анализатора, реализующего процедуру синхронного усреднения, входит источник питания интегрирующего усилителя. Коэффициент усиления усилителя автоматически регулируется таким образом, чтобы обеспечить оптимальный динамический диапазон, не допуская при этом перегрузки по входному каналу. Далее - в соответствии с практикой корректного применения БПФ - входной сигнал фильтруется с целью подавления составляющих, лежащих выше заданного диапазона частот, что позволяет минимизировать эффект наложения спектров.
После фильтрации сигнал поступает на устройство аналого-цифрового преобразования (АЦП), которое производит дискретизацию сигнала с частотой в 2,56 раз превышающей максимальную частоту диапазона измерений. Таким образом, если диапазон частот расположен в пределах 1 кГц, частота дискретизации (или частота выборки) составляет 2,56 кГц.
Полученные выборочные значения хранятся в буфере данных, чей объем в 2,56 раз превышает число линий в спектре БПФ. Если выбран режим анализатора с 400 линиями разрешения, тогда общий объем буфера должен обеспечивать хранение 1024 значений сигнала. Соответствующая этому объему общая длительность выборки определяется как отношение числа выборочных значений к частоте дискретизации. Таким образом, если число линий спектра равно 400, а максимальная частота спектра Fmax равна 1000 Гц, тогда общая длительность выборки T=400 мс.
Как только буфер данных заполняется полностью, происходит преобразование данных из временной области в область частот посредством процессора БПФ.
При обычном режиме усреднения происходит последовательное суммирование всех рассчитанных спектров с коэффициентом, обратно пропорциональным числу членов суммы, после чего на экране анализатора отображается усредненный спектр. Например, если усреднение проводят по 10 спектрам, тогда 10 последовательных спектров суммируются и полученный результат делится на 10.
Синхронное усреднение отличается от обычного усреднения тем, что суммирование и усрднение происходит непосредственно в буфере данных до реализации процедуры БПФ.
Такое усреднение имеет смысл только в том случае, если процесс дискретизации синхронизован с вращением ротора. Реализуется это условие посредством сигнала синхронизации, который запускает начало процесса выборки. Когда число отсчетов становится равным объему буфера данных (в нашем примере это 1024), происходит суммирование данной выборки с суммой предшествующих выборок (т.е. суммируются элементы выборок, занимающие одно и то же положение в буфере данных). Суммирование выборок продолжается до тех пор, пока их общее число не достигнет заранее установленного значения.
Далее для получения усредненной временной выборки каждый элемент накопленной суммарной выборки делят на число членов суммы. Поскольку точки, где значения сигнала, синхронизованного с вращением ротора, высоки, всегда находятся в одном и том же месте относительно начала выборки, последовательное суммирование позволит выделить эти значения на фоне шума и несинхронных составляющих.
Синхронное усреднение позволяет повысить точность измерения амплитуды и фазы синхронной составляющей сигнала.
Точность измерения фазы
Измерения фазы оборотной составляющей вибрации, связанной с дисбалансом ротора, требуют специального рассмотрения с точки зрения их точности и воспроизводимости.
Обычный одноканальный БПФ-анализатор с фиксированными характеристиками аналогового фильтра нижних частот (для предотвращения наложения спектров) и постоянной частотой дискретизации, не зависящей от скорости вращения ротора, не позволит провести измерения фазы с высокой точностью.
Погрешности, связанные с работой фильтра нижних частот
Необходимо, чтобы результаты измерений не были подвержены влиянию эффекта наложения спектров, который может наблюдаться при значительных изменениях в скорости вращения ротора. Эту проблему можно решить, используя в качестве аналогового фильтра следящий фильтр, чья верхняя частота среза изменяется синхронно с частотой вращения ротора.
Поскольку частота дискретизации определяется выбранным диапазоном частот анализа, расположение во времени точек отсчета сигнала вибрации должно также соответственно изменяться с изменением частоты вращения. Это означает, что от обычного частотного спектра мы переходим к порядковому спектру, где первому порядку соответствует скорость вращения ротора машины, а максимальная частота анализируемого диапазона определяется выбором в меню максимального значения порядка гармоники.
Точность измерения фазы
Точность измерения фазы будет максимальной, если число линий в спектре будет кратным выбранному максимальному значению порядка. Так если в спектре БПФ-анализатора содержится 400 линий, то подходящим максимальным значением порядка будет 20, 10 или 5, а неподходящим - 3, 7 или 9.
При выполнении вышеуказанного правила погрешность измерения фазы, обусловленная самой процедурой БПФ, будет равна нулю.
Погрешность, обусловленная работой следящего фильтра
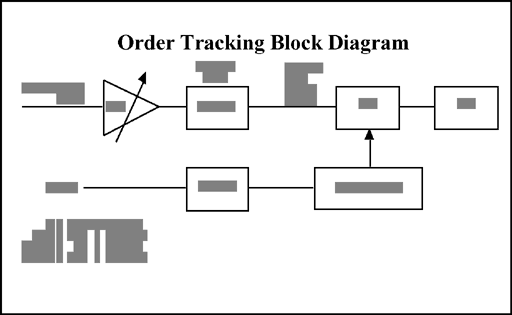
Следящий фильтр также вносит погрешность в измерения фазы. Это обусловлено тем, что сдвиг фазы, вносимый фильтром, не является постоянным, а увеличивается с порядком гармоники. Данную погрешность можно уменьшить, если из измеренного значения фазы каждой гармоники вычитать сдвиг фазы, вносимый следящим фильтром. Для этого работу фильтра моделируют с помощью программно-аппаратных средств, что позволяет построить табличную зависимость сдвига фазы от номера гармоники. Упрощенная блок схема синхронной фильтрации показана на рисунке 2.
Усиление сигнала вибрации
Коэффициент усиления автоматически регулируется входным усилителем, чтобы оптимальным образом согласовать сигнал с динамическим диапазоном измерительного тракта. Сигнал проходит через следящий фильтр, чья частота среза посредством сигнала синхронизации постоянно отслеживает изменения оборотной частоты. В данном случае значение частоты среза равно максимальному значению порядка N гармоники, входящей в полосу анализа, умноженному на значение оборотной частоты Fr. Таким образом, с изменением оборотной частоты изменяется и частота среза фильтра. Положение точек отсчета также постоянно изменяется в зависимости от скорости вращения, а частота дискретизации SR определяется соотношением SR=2,56*N*Fr.
Это обеспечивает внесение нулевой погрешности, обусловленной процедурой БПФ, в измерение фазы сигнала. Окончательное значение фазы определяется после коррекции на известное значение сдвига фазы следящего фильтра, найденное в процессе его моделирования.
Сравнение методов измерения фазы
Сравнение синхронного усреднения и усреднения по частотным спектрам вибрации Была собрана экспериментальная установка, в состав которой входил генератор сигналов, позволяющий моделировать сигнал на частоте вращения с известным значением фазы (относительно некоторого опорного значения). Далее в сигнал замешивались несинхронные составляющие с частотами, близкими к частоте вращения.
Измерения моделируемого дисбаланса
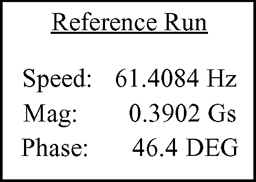
Первые измерения были проведены с целью определения параметров некоторого стационарного опорного сигнала. Для этого был сформирован синусоидальный сигнал заданной длительности с частотой 61,4 Гц и известной начальной фазой. Обычное усреднение и синхронное усреднение дали одинаковые результаты измерения амплитуды и фазы. Результаты этих измерений показаны на рисунке 3.
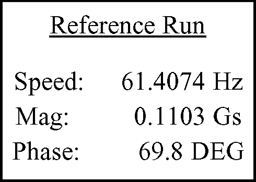
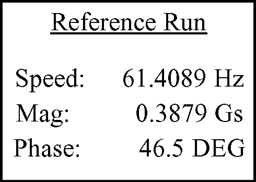
Speed - частота, Mag - амплитуда, Phase - фаза, Hz - Гц, Gs - g, DEG - градусы
Затем к опорному сигналу был примешан еще один сигнал с медленной разверткой по частоте в диапазоне от 59 до 62 Гц. Результат измерений с помощью обычной процедуры усреднения показан на рисунке 4. Видно, что измеренное значение амплитуды составляет только около 1/3 первоначального значения, а фаза сдвинута относительно ее истинного значения более чем на 200.
Последняя таблица (рисунок 5) показывает результат измерений с использованием процедуры синхронного усреднения: отклонение и амплитуды, и фазы от истинных значений не превышает 0,2%.
Поскольку в процессе синхронного усреднения несинхронные составляющие имеют тенденцию к убыванию, использование достаточно длинной реализации сигнала позволяет получить в результате только постоянные синхронные составляющие.
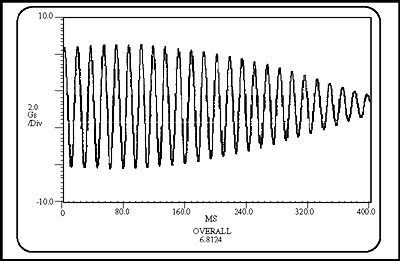
На следующих графиках сравниваются результаты усреднения, полученные двумя способами: с использованием синхронного усреднения и обычного усреднения спектров, - при наличии помехи на близлежащей частоте. Эффект биений двух частот показан на рисунке 6.
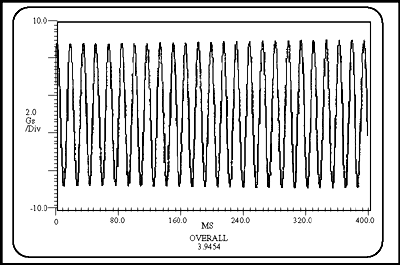
На рисунке 7 показан случай, когда помеха не синхронна с основным сигналом и в результате синхронного усреднения обращается в нуль.
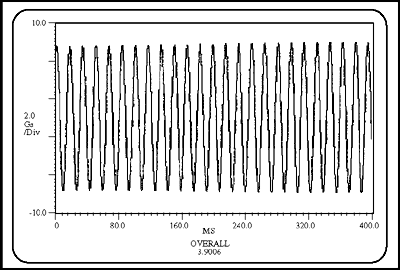
На рисунке 8 показан сигнал без помехи. Видно, что это практически тот же сигнал, что и был получен в результате синхронного усреднения при наличии помехи.
Обычный метод усреднения дает значительные расхождения измеренного значения амплитуды сигнала с истинным значением амплитуды синхронной составляющей. Поэтому использование синхронного усреднения может быть весьма эффективным в процедурах точной балансировки, когда в процессе пробных пусков сигнал либо тонет в шумах, либо маскируется помехой на близкой частоте, наведенной другими машинами.
При использовании одноканального БПФ-анализатора точное и воспроизводимое измерение фазы представляет собой сложную задачу. Она требует использования фильтра, отслеживающего частоту вращения ротора машины, средств управления моментами снятия отсчетов сигнала и компенсации фазового сдвига, вносимого фильтром.
На практике шум и близкие по частоте сигналы помехи нередко приводят к получению весьма нестабильных результатов измерений. Использование процедуры синхронного усреднения минимизирует влияние разного рода помех, позволяя получать точные и стабильные измерения фазы в реальном времени.
Случается, что точную балансировку машин приходится проводить в условиях повышенных шумов и близких к оборотной частоте составляющих, связанных с реализацией конкретного технологического процесса. Упростить проведение измерений можно с помощью портативного анализатора с автономным питанием, в который «вшиты» соответствующие балансировочные программы.

 Ваши
отзывы и предложения ждем по адресу: mail@vibration.ru Ваши
отзывы и предложения ждем по адресу: mail@vibration.ru |
Cайт поддерживается ООО «ИНКОТЕС» |